시나리오 불러오기
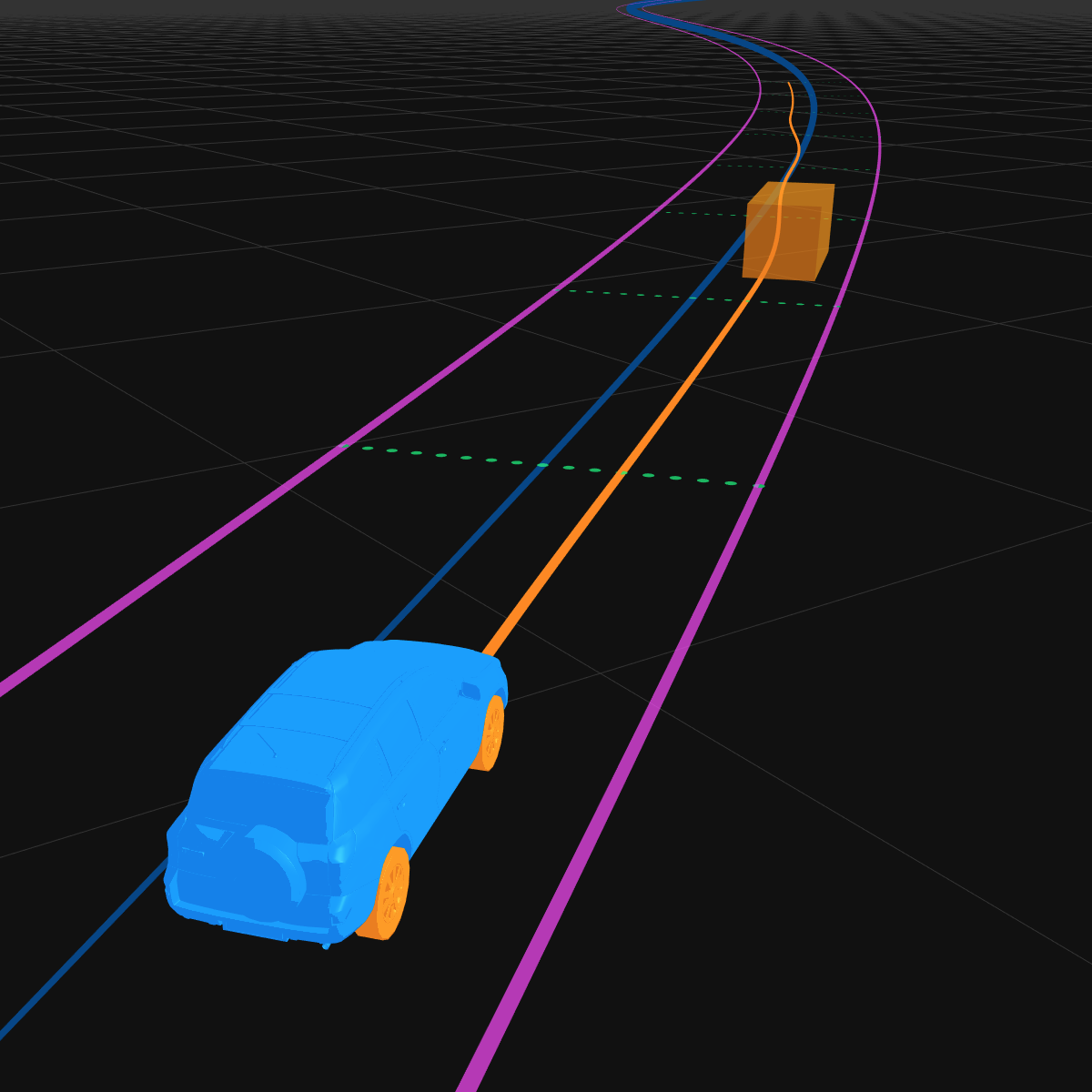
차량 1대 추월
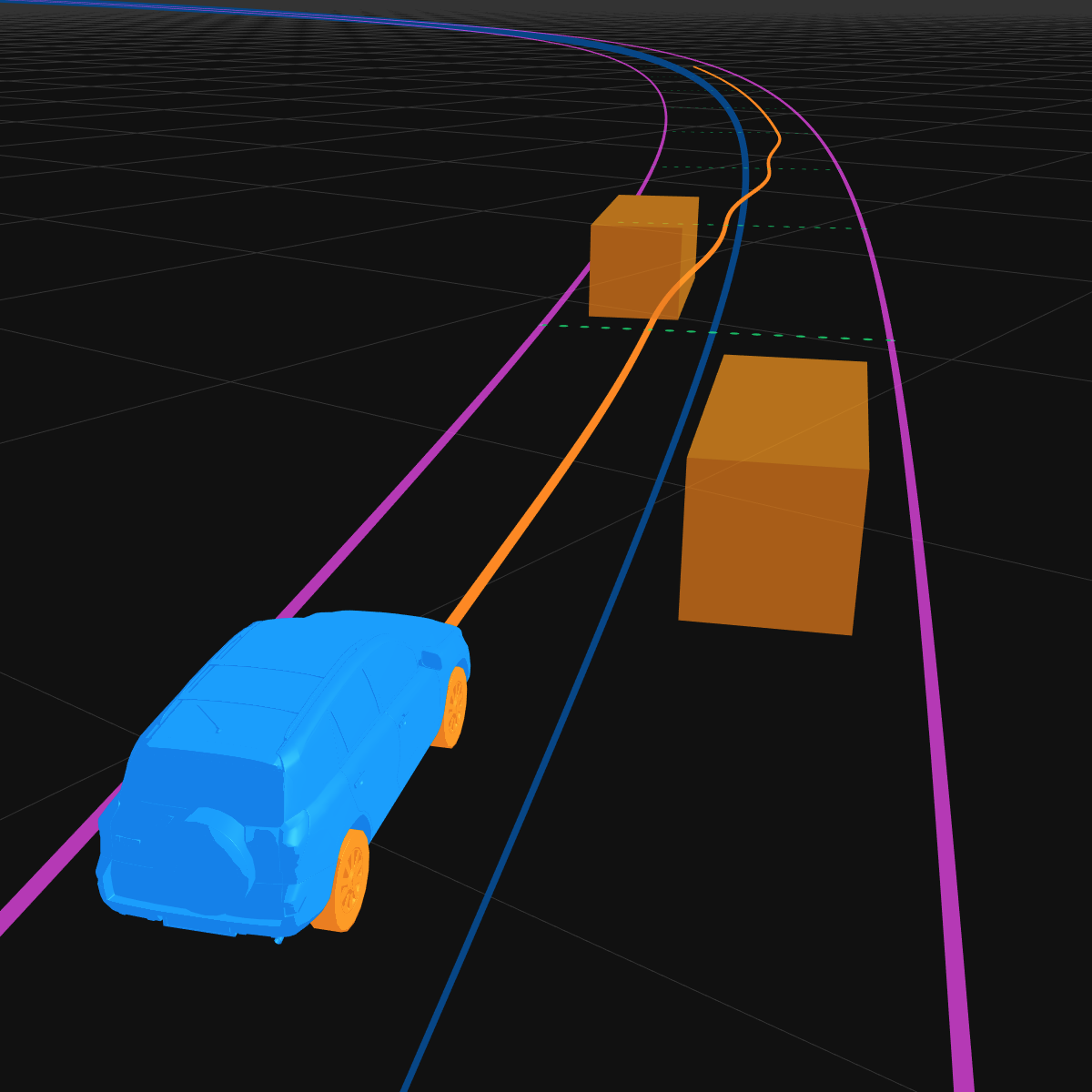
차량 2대 추월
거친 도로
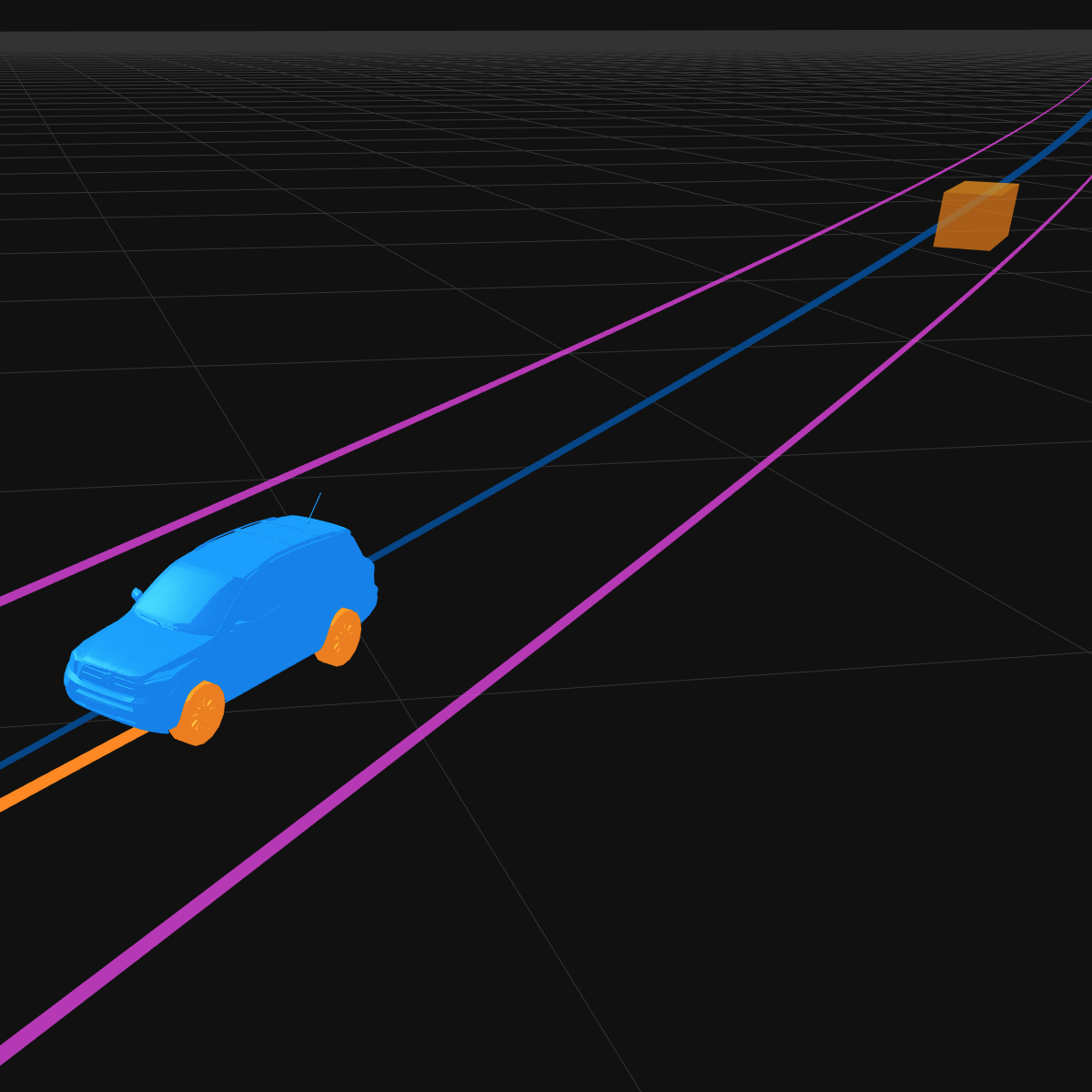
과속 차량 피하기
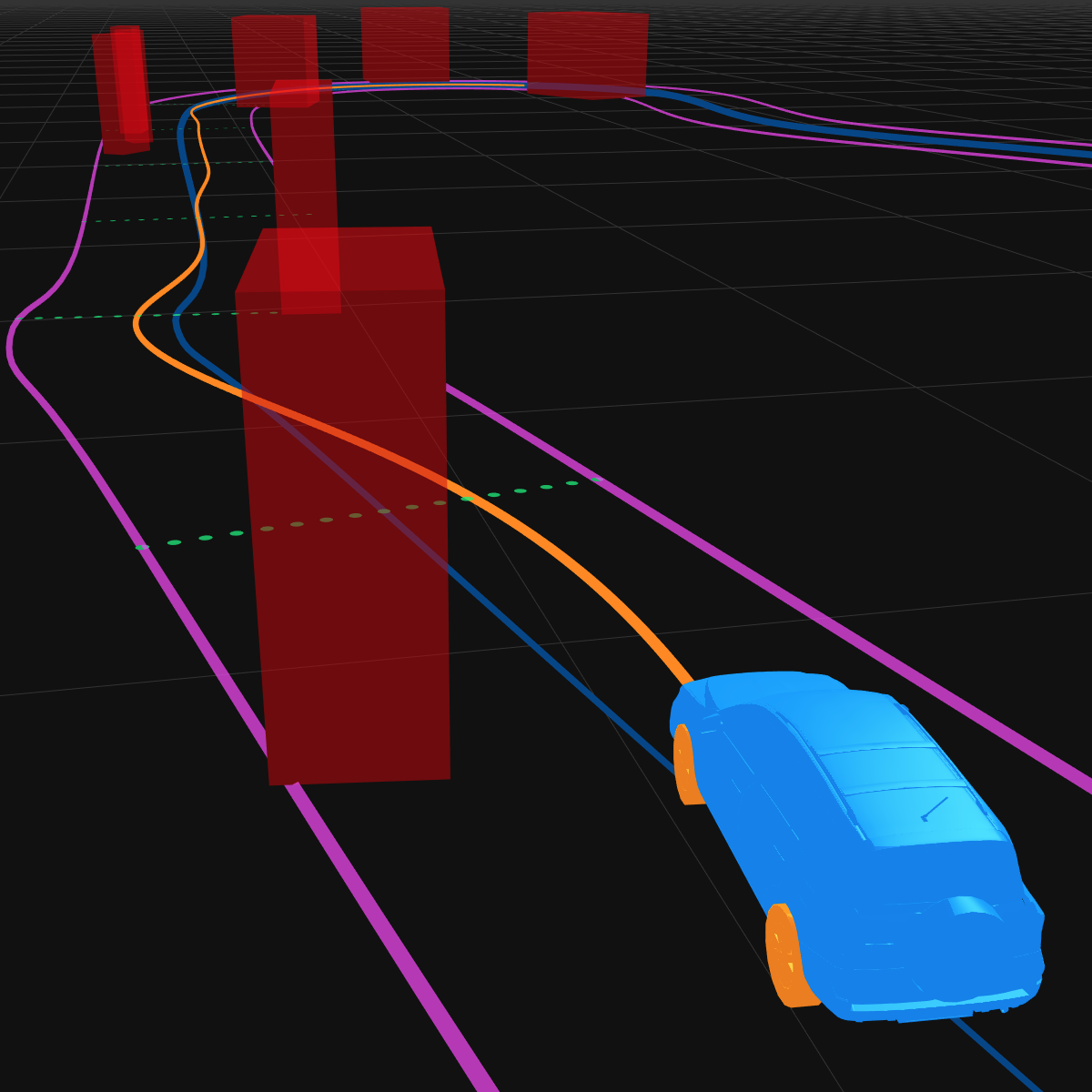
막혀있는 차선
저속 차선 행렬에 합류하기
횡단보도 주행
선두 그룹 추격
이름
저장 일자